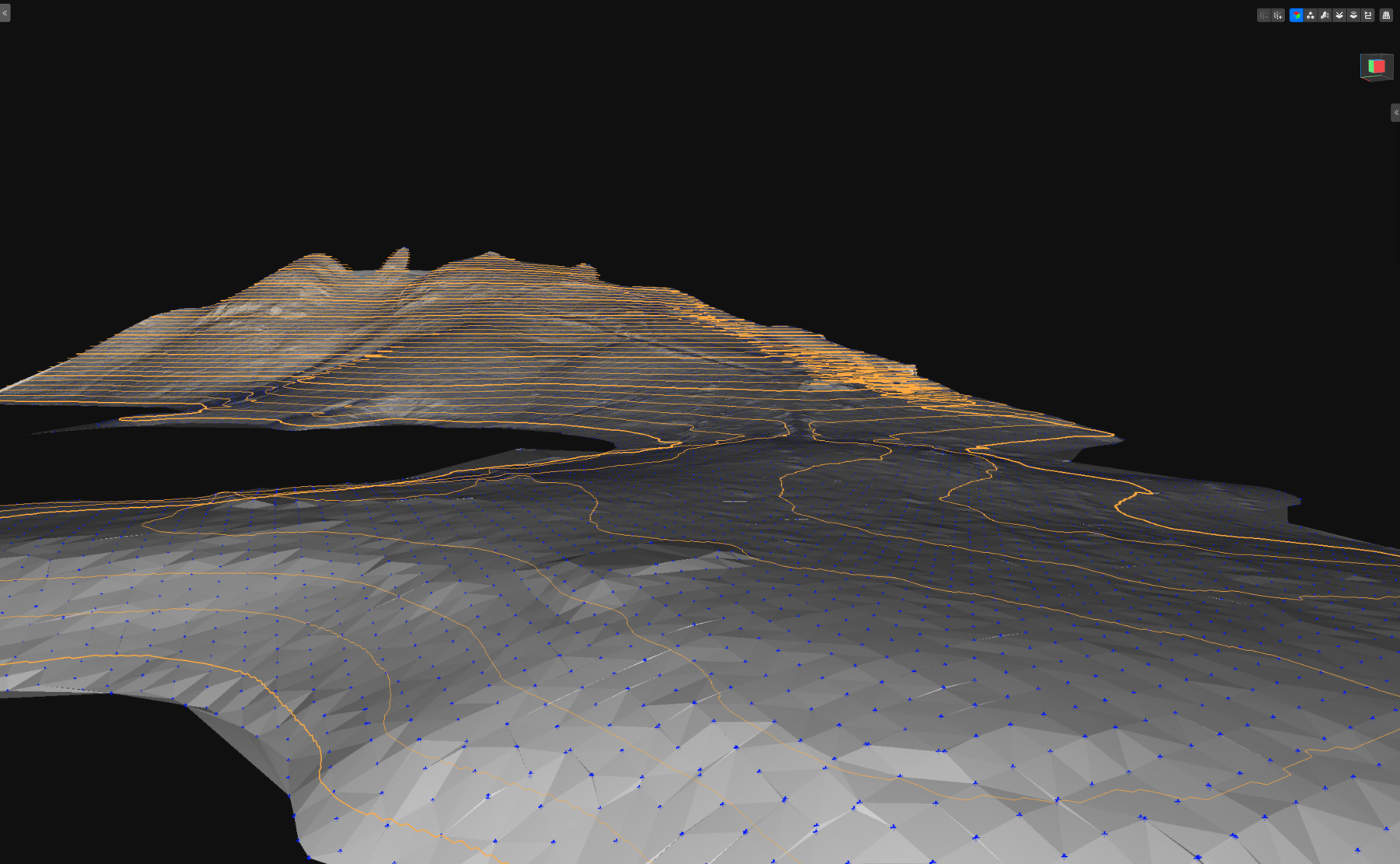
Se realizó el post procesado en DJI Terra y DJI Modify, fusionando dos planes de vuelo a distintas alturas. Se empleó un DJI Matrice 400 RTK con Zenmuse L3 y Dji D-RTK 3.
Primer vuelo terreno, rápido:
- Altitud: 100 m
- Modo: Cenital
Segundo vuelo edificio, lento:
- Altitud: 40 m
- Modo: Oblicuo
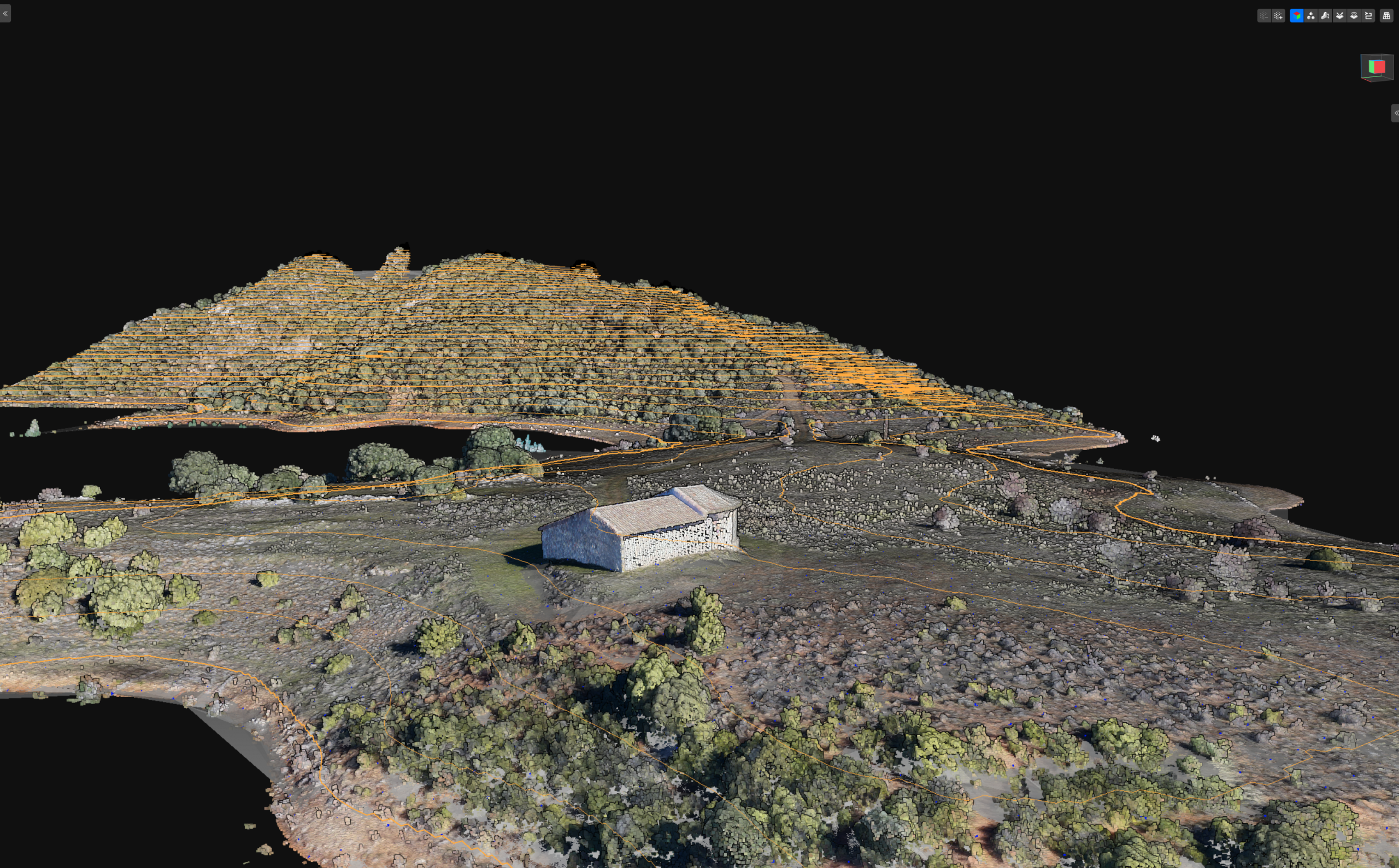
Ambos vuelos se integraron en DJI Terra para obtener el máximo nivel de detalle posible en la estructura (iglesia), manteniendo una representación precisa del terreno general y optimizando la velocidad de procesamiento. En la siguiente fase, se probará utilizando un DJI Matrice 4E para mejorar el nivel de detalle en la estructura (vuelo en modo captura 3d inteligente) y probaremos si se puede fusionar con los datos del LiDAR L3 correspondiente al terreno.
Buen vuelo.